

I had purchased a FPV racer recently, an X220HV from Eachine. Setup is long, about 2 months between purchasing the first parts and having something flying in the good direction (the direction you want…). Here the issues I’ve faced and how to overcome those.
All started by a colleague showing me his FPV racer. He gives me some advices, I read some more, and ta-da ! I’ve launched a purchase of x220hv from Eachine. It comes from China, and the shipment was looong. More than four weeks.
On top of the FPV racer itself, I needed the goggles for the FPV part, some spare parts like arm and propellers. As well the Taranis Q X7 radio, plus the famous LiPo 4S batteries. I think that I was ready to flight.
And I was wrong… One piece was missing, the R-XSR FrSky receiver to mount on the FPV racer. As all know (except noobs like me) there is no receiver for the radio signals, so you need to add one according to your radio.
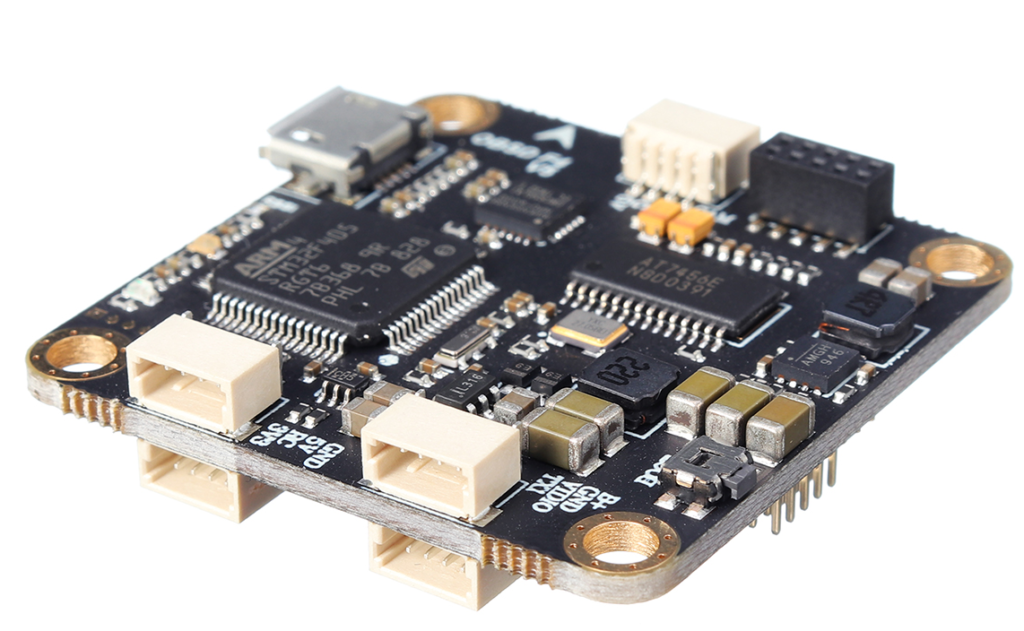
After some more delivery time, I received the R-XSR receiver, and dismantle totally the FPV racer to see how it was assembled and to add the receiver. I’ve removed the SpeedyBee for bluetooth connection to avoid troubles. For R-XSR, there was a connector on the board and on the Flight Controller (FC) so I can’t solder easily. After searching how to do it, I’ve ended by using two connectors I had received with the stuff I’ve ordered. Finally, receiver was linked to GND/5V/RC plug on the FC.
Then pairing. Pairing is something quite simple. Power up your Taranis, plug your battery while keeping some buttons on the R-XSR pushed with your radio in pairing mode, reboot one time, that should be no issue.
So now everything was ready.
But that was the hardware part only. Here comes the software too. First step is the radio. You need to setup channel mixer so when you touch something it is sent to the air. Mainly the directions, plus 3 buttons. One for bip, one for arming, and the last one for changing the flight mode.
You’ll need BetaFlight to configure your FPV racer. Download and install is quick, then you can plug an USB cable to your computer and connect, so you can talk to your racer.
I’ve spent hours to understand why it was not communicating with the radio. That was the LiPo battery which was not plugged, because I was thinking that the USB was good enough to power up the FC. It’s not, you need a battery. Remove the propellers before, for safety reasons.
Then you go to ports setup in betaflight and says that the receiver (Serial RX) is on port 6, which was not obvious.
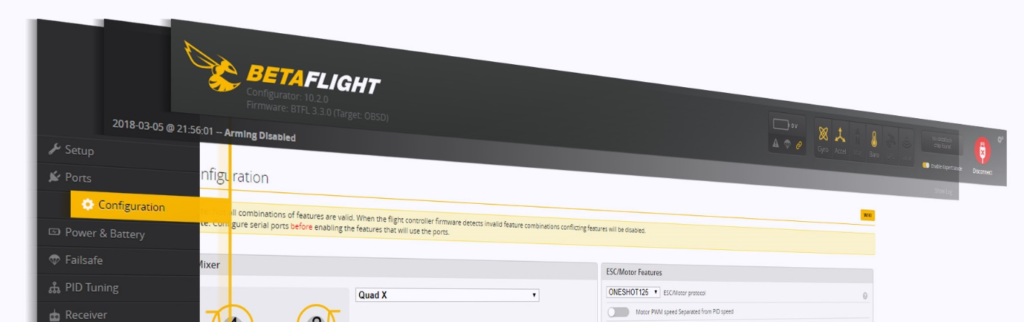
Other things to configure are quite simple, note that I had lost the configuration for the radio, not sure why. My first attempt to flight was cancelled for that reason. Reading the configuration for channels I had setup it for TAER like my radio. It was back to AERT… After some more time, configuration was finally ok and ready to flight, as shown by a quick trial in the garden.
It looks like this FPV racer has issues about a death roll, meanining it will goes into loop if there is a brutal move. It’s probably only in 6S, and I’m in 4S, so I think that will be only me looping and crashing, I’ll let you know in some time 🙂 There is a run-in period for the batteries, and only after that period I can do brutal moves.
